Let’s continue here with garbage collector,
Garbage Collection
Garbage collection is the process of freeing space in the heap or the nursery for allocation of new objects.
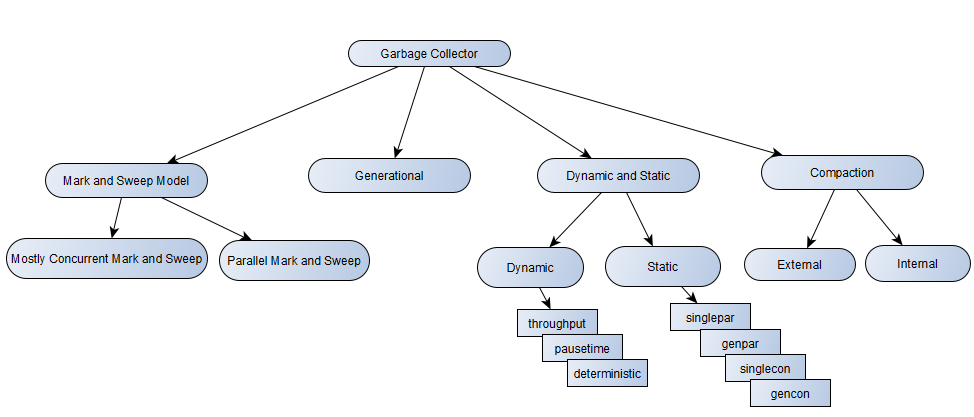
Let’s look at the models of Garbage Collection.
- The Mark and Sweep Model
- Generational Garbage Collection
- Dynamic and Static Garbage Collection Modes
- Compaction
The Mark and Sweep Model
This model is for performing garbage collections of the whole heap. This has two phases, the mark phase and the sweep phase.
During the mark phase all objects that are reachable from Java threads, native handles and other root sources are marked as alive, as well as the objects that are reachable from these objects and so forth. This process identifies and marks all objects that are still used, and the rest can be considered garbage.
During the sweep phase the heap is traversed to find the gaps between the live objects. These gaps are recorded in a free list and are made available for new object allocation.
There are two improved versions of Mark and Sweep Model,
- Mostly Concurrent Mark and Sweep
- Parallel Mark and Sweep
Mostly Concurrent Mark and Sweep
This is otherwise called, concurrent garbage collection which allows the Java threads to continue running during large portions of the garbage collection. The threads must however be stopped a few times for synchronization.
The mostly concurrent mark phase is divided into four parts:
- Initial marking, where the root set of live objects is identified. This is done while the Java threads are paused.
- Concurrent marking, where the references from the root set are followed in order to find and mark the rest of the live objects in the heap. This is done while the Java threads are running.
- Precleaning, where changes in the heap during the concurrent mark phase are identified and any additional live objects are found and marked. This is done while the Java threads are running.
- Final marking, where changes during the precleaning phase are identified and any additional live objects are found and marked. This is done while the Java threads are paused.
The mostly concurrent sweep phase consists of four parts:
- Sweeping of one half of the heap. This is done while the Java threads are running and are allowed to allocate objects in the part of the heap that isn’t currently being swept.
- A short pause to switch halves.
- Sweeping of the other half of the heap. This is done while the Java threads are running and are allowed to allocate objects in the part of the heap that was swept first.
- A short pause for synchronization and recording statistics.
Parallel Mark and Sweep
The parallel mark and sweep strategy (also called the parallel garbage collector) uses all available CPUs in the system for performing the garbage collection as fast as possible. All Java threads are paused during the entire parallel garbage collection.
Generational Garbage Collection
The nursery, when it exists, is garbage collected with a special garbage collection called a young collection. A garbage collection strategy which uses a nursery is called a generational garbage collection strategy, or simply generational garbage collection.
The young collector used in the JRockit JVM identifies and promotes all live objects in the nursery that are outside the keep area to the old space. This work is done in parallel using all available CPUs. The Java threads are paused during the entire young collection.
Dynamic and Static Garbage Collection Modes
By default, the JRockit JVM uses a dynamic garbage collection mode that automatically selects a garbage collection strategy to use, aiming at optimizing the application throughput. The following dynamic modes are available:
throughput, which optimizes the garbage collector for maximum application throughput. This is the default mode.pausetime, which optimizes the garbage collector for short and even pause times.deterministic, which optimizes the garbage collector for very short and deterministic pause times. This mode is only available as a part of Oracle JRockit Real Time.
The major static strategies are:
singlepar, which is a single-generational parallel garbage collector (same asparallel)genpar, which is a two-generational parallel garbage collectorsinglecon, which is a single-generational mostly concurrent garbage collectorgencon, which is a two-generational mostly concurrent garbage collector
Compaction
Objects that are allocated next to each other will not necessarily become unreachable (“die”) at the same time. This means that the heap may become fragmented after a garbage collection, so that the free spaces in the heap are many but small, making allocation of large objects hard or even impossible. Free spaces that are smaller than the minimum thread local area (TLA) size can not be used at all, and the garbage collector discards them as dark matter until a future garbage collection frees enough space next to them to create a space large enough for a TLA.
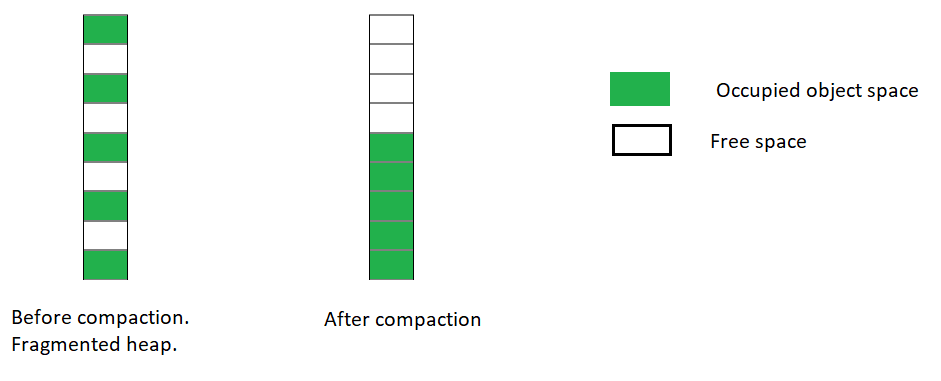
To reduce fragmentation, the JRockit JVM compacts a part of the heap at every garbage collection (old collection). Compaction moves objects closer together and further down in the heap, thus creating larger free areas near the top of the heap. The size and position of the compaction area as well as the compaction method is selected by advanced heuristics, depending on the garbage collection mode used.
External and Internal Compaction
The JRockit JVM uses two compaction methods called external compaction and internal compaction. External compaction moves (evacuates) the objects within the compaction area to free positions outside the compaction area and as far down in the heap as possible. Internal compaction moves the objects within the compaction area as far down in the compaction area as possible, thus moving them closer together.
The JVM selects a compaction method depending on the current garbage collection mode and the position of the compaction area. External compaction is typically used near the top of the heap, while internal compaction is used near the bottom where the density of objects is higher.
Sliding Window Schemes
The position of the compaction area changes at each garbage collection, using one or two sliding windows to determine the next position. Each sliding window moves a notch up or down in the heap at each garbage collection, until it reaches the other end of the heap or meets a sliding window that moves in the opposite direction, and starts over again. Thus the whole heap is eventually traversed by compaction over and over again.
Compaction Area Sizing
The size of the compaction area depends on the garbage collection mode used. In throughput mode the compaction area size is static, while all other modes, including the static mode, adjust the compaction area size depending on the compaction area position, aiming at keeping the compaction times equal throughout the run.
The compaction time depends on the number of objects moved and the number of references to these objects. Thus the compaction area will be smaller in parts of the heap where the object density is high or where the amount of references to the objects within the area is high.
Typically the object density is higher near the bottom of the heap than at the top of the heap, except at the very top where the latest allocated objects are found. Thus the compaction areas are usually smaller near the bottom of the heap than in the top half of the heap.